Trajectory generation and control of a quadrotor
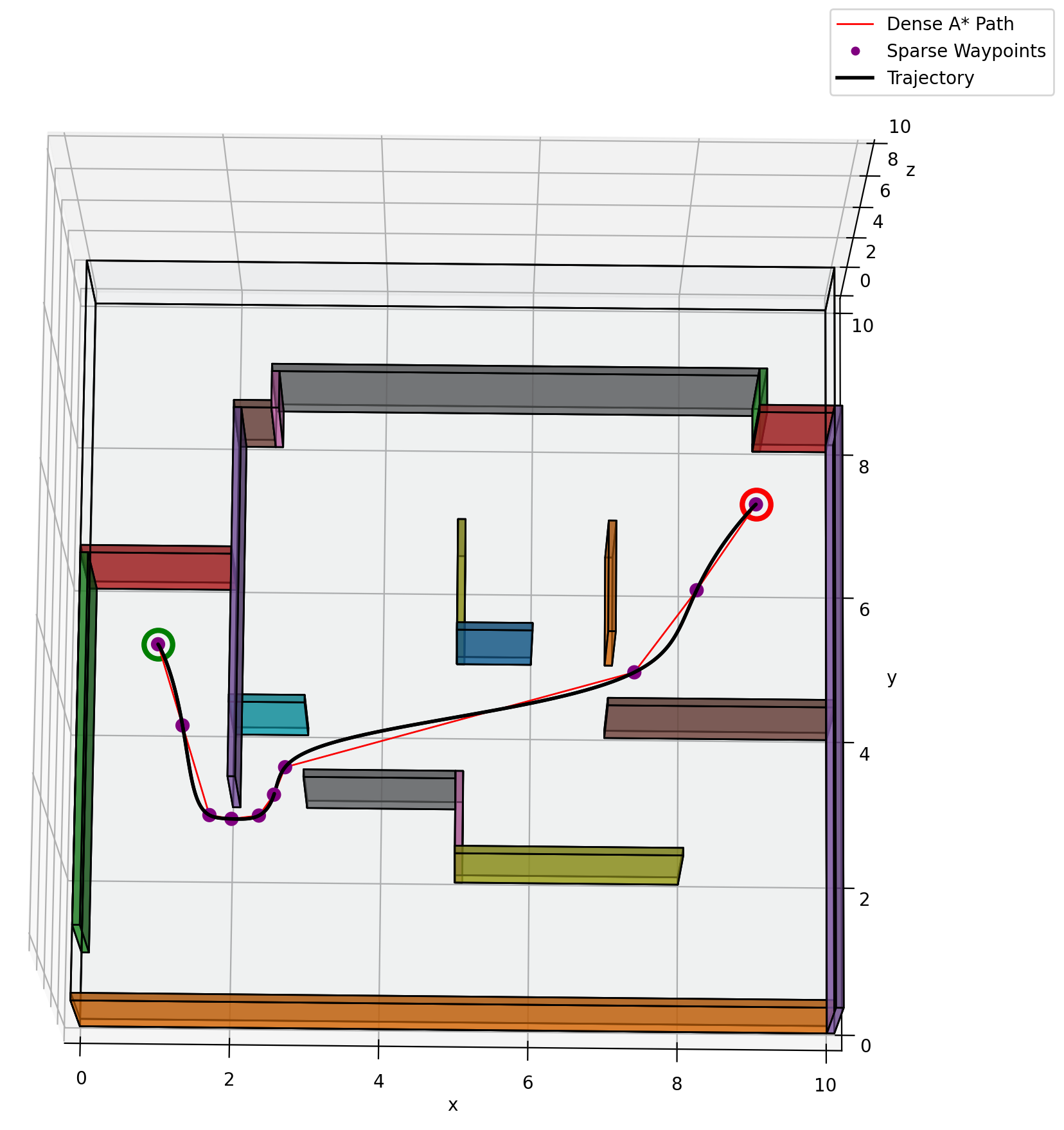
The objective of this project was to write a path planner, trajectory generator and controller to fly a quadrotor through different maps with obstacles and tight passages. In this project, my quadrotor flew the fastest overall time across a series of different map layouts. To achieve this time, I used searched for a potential path using visibility graphs and used a minimum jerk trajectory. Due to COVID-19 and restricted lab access, the implementation was tested in simulation only but should be runnable on the Bitcraze Crazyflie.
Slides and leaderboard
Page: /
Videos
Additional images
Lukas Vacek
Former management consultant now working in tech, with a huge passion for things that fly.