Lukas Vacek
University of Pennsylvania
Biography
Lukas was born in Czech Republic, raised in Japan and Hong Kong, studied in Philadelphia and worked on four different continents, making him a true global citizen. He graduated from the University of Pennsylvania with a degree in Computer Science with a Math minor from the School of Engineering and Applied Sciences and a degree in Finance from the Wharton School of Business.
Lukas worked as a robotics researcher at Penn’s General Robotics, Automation, Sensing & Perception (GRASP) Lab, developing guidance, navigation and control systems for UAVs. His work resulted in multiple published papers and a patent. Lukas also got to deep-dive into machine learning at Amazon Alexa, where he developed software for the Echo Show and Echo Look.
From 2017 to 2020, Lukas worked as an Engagement Manager at McKinsey & Company, serving clients in North America, Europe, South East Asia and the Caribbean across a wide range of industries. Lukas specialized in strategy, corporate finance, private equity and large-scale, rapid corporate transformations projects.
In 2020, Lukas left the Firm to return to the world of technology, work on a startup and pursue graduate education. During COVID-19, he quickly adapted by moving to Bermuda and used his engineering and business background to advise private equity firms and their portfolio companies. Partnering with top management consulting firms, he consulted on ~30 projects, including in the biotech and pharmaceutical industries. During this time, he developed a novel quantitative geospatial analysis technique that helps companies assess which new markets to expand into and using which growth strategy.
In 2023, Lukas enrolled in The University of Hong Kong’s Juris Doctor program and in 2025 was accepted into the dual-degree LLM program at Penn Carey Law. In his free time, Lukas likes to fly planes (real ones & radio-controlled), sail and ski.
Download my resumé.
- Aerospace & aviation
- Aerial robotics
- Artificial intelligence & machine learning
- Finance
- Corporate distress & turnaround
-
Master of Laws (LLM), In progress
Penn Carey Law School, University of Pennsylvania
-
Juris Doctor (JD), In progress
Faculty of Law, The University of Hong Kong
-
Bachelor of Science in Economics (Finance), 2017
Wharton School of Business, University of Pennsylvania
-
Bachelor of Science in Engineering (Comp. Science), 2017
School of Engineering, University of Pennsylvania
Experience
May not be exhaustive, for most recent work experience please contact me.
- Successfully led ~30 consulting projects; usually run in collaboration with other consulting firms (incl. MBB)
- Industry focus on private equity funds and their portfolio companies (strong exposure to healthcare and biotech)
- Scope of consulting projects included: assessing market size, competitive dynamics & landscape, growth strategy, potential operational improvements and product segmentation & differentiation
- Specialized in strategy, corporate finance, private equity and large-scale, rapid corporate transformations
- Ran projects with both large-cap and small-cap companies across the entire globe, in both developed & developing regions, including: United States, Europe, South East Asia & the Caribbean
Sample projects include:
- Multiple commercial, vendor and operational due diligences to assess market size, dynamics, competitive landscape and operational improvements across various industries, such as: electronic table games, advanced industries, healthcare, high tech, government services, automotive, travel and chemicals
- Created a ‘future of mobility’ vision for supersonic air travel, including how this futuristic market could work
- Identified a financial distress scenario in a public company, resulting in an immediate, rapid transformation
- Improved working capital and reduced SG&A costs for a public company as part of a broad transformation
- Built strategy for supermajor O&G company to expand into renewable energy
- Developed a strategic response for a state-run health insurance company to deal with the launch of universal healthcare in a developing country
- Optimized supply chain & manufacturing operations for a major semi-conductor manufacturer
- Designed the financial restructuring of a Caribbean-based company suffering from long-term unprofitability
- Created a go-to-market & competitive response strategy for a major payments company
- Designed guidance, navigation and control (GNC) algorithms for indoor and outdoor use on aerial robots, including path planning, computer vision (mono and stereo camera), object deployment and recovery, and mission control
- Developed fully-integrated software and hardware for aerial robotic applications in agriculture, such as leaf sample collection or mosquito trap deployment and recovery for in-situ analysis (patent pending)
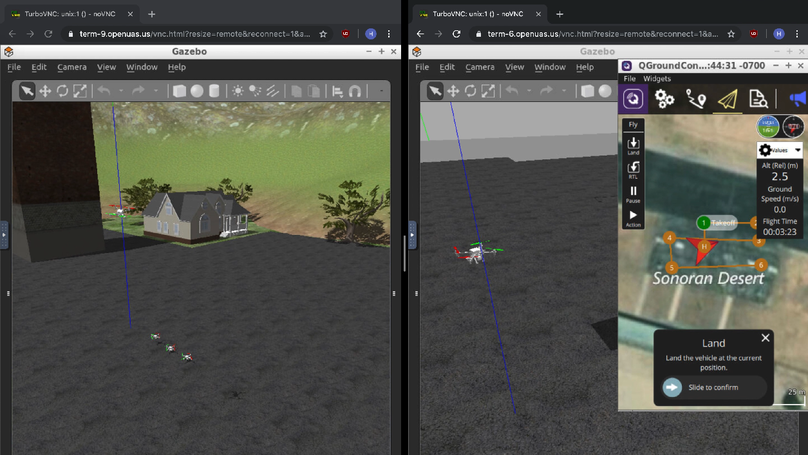
- Contributed to the OpenUAV project (openuav.us) to create an open-source, easy-to-use UAV hardware and software platform for research and academic use
- Published and/or presented papers at multiple conferences, including: ICUAS 2017, ACM/IEEE 2018
- Helped create the inaugural NSF CPS-VO competition sponsored by the National Science Foundation
- Lead the team that won 1st place at the NSF CPS-VO competition in October 2016
- Created the club vision, structure and organization. Organized projects and lead competitions for the club.
- At the time of founding was Penn’s 2nd competitive engineering club (after Penn Electric Racing)
- 1st Place: NSF CPS-VO Competition, October 2016
- 18th place (out of 138 entries): AIAA Design-Build-Fly Initial Proposal, October 2016 (competition in April 2017)
- Best Technical Paper Award: International Aerial Robotics Competition, August 2016
Featured publications

All publications
Projects
More sample projects will be added in due time





Adventures
A sneak peek into my hobbies

Flying planes
In 2015 I got my pilot’s license and have been flying aircraft ever since. Highlights include flying down the Hudson River in NY’s Class B airspace.

Motorcycle roadtrips
I like to explore new places by motorcycle; in 2024 I crossed the European Alps, rode offroad and saw some spectacular scenery.

Ski camping
There is no better way to guarantee being the first one on the slopes than ski camping. Went ski camping in both the US and Europe.

Learning to paraglide
In 2021, I learned how to paraglide in Wales, United Kingdom. Flying without an engine and landing in sheep fields was quite the experience!

Sailing
I learned to sail as a young child, sailed in various corners of the world, became a sailing instructor and even delivered sailboats.

Bikepacking
I have bikepacked across the United States and Europe, even visiting the biggest airshow in the world (EAA Oshkosh) on a bicycle.